 |
| DJI Phantom mit Futaba R7008SB Empfänger aufgerüstet und T14SG Handsender samt Telemetriefunktion. |
Nachtrag: DJI hat inzwischen beim Phantom Sender und Empfänger überarbeitet und spricht nun von einem Frequenzsprungverfahren. Allerdings werden anscheinend gerade einmal vier Frequenzen verwendet.Nachdem ich inzwischen doch schon etliche Stunden das Phantom geflogen bin, wollte ich nun auch etwas mehr als nur Pritschenklasse: mehr Übertragungssicherheit sowie mehr Komfort in Form von automatisch mitlaufenden Stoppuhren (Akkulaufzeit) und einem ordentlichen Drehgeber für das Neigen der Kamera im anvisierten Gimbal sollen schon sein.
In der Tat wurde ich auch bei Futaba mit dem Sender T14SG sowie einem passenden Empfänger R7008SB samt Telemetrie der Akkuspannung fündig. Und so nahm der Umbau seinen Lauf...
Welche Funke wählen?
Zunächst stand ich als in dieser Thematik völlig Unbeleckter vor der Aufgabe, mir eine passende neue 2,4GHz-Funke aus dem unübersichtlichen Angebot herauszusuchen. In diesem Bereich gibt es heute zum Glück viele Alternativen mit leistungsfähiger Technik. Wenn ich da zwanzig Jahre zurück denke, als man teuer mit 35MHz-Quarzen herumhantieren musste und die Fernsteuerungen samt ihrer «Anleitungen» primär von Sadisten entwickelt worden waren...
Aber nun zu meiner Anforderungsliste:
- Die Grundvoraussetzung war ja noch einfach: mein zukünftiger Handsender musste mindestens 7, besser 8 Kanäle unterstützen.
- Dann musste das Übertragungsverfahren noch deutlich sicherer als das beim mitgelieferten DJI Sender sein (eigentlich kein Problem).
- Weiterhin mussten am Sender mindestens zwei Schalter mit jeweils 3 Stellungen vorhanden sein, um die gewohnte Bedienung für Flugmodus und GPS-Modus übernehmen zu können. Erst wie früher Schalter kaufen, Funke aufschrauben, alles hineinpopeln und dann noch umständlich programmieren wollte ich nicht. Zum Glück wollen das wohl offensichtlich auch viele Kunden genauso wenig, wie ein Blick auf die angebotenen Sender rasch zeigte.
- Und schließlich musste noch für den zukünftigen Kamera-Gimbal ein Drehsteller wahlweise oben auf dem Sender und besser noch seitlich vorhanden sein, der sich auch bedienen lässt, ohne die Hand vom Steuerknüppel nehmen zu müssen. Damit lässt sich die Kamera imFlug schwenken.
- Außerdem wollte ich noch eine halbwegs passable Benutzerführung mit großem LCD-Display und mit wenigen Tasten. Nicht dieses damalige mc-20-Chaos von Graupner, das auf mich immer den Eindruck machte, die Ausgeburt einer einsammen Kellerentwicklung gewesen zu sein. Gerüchteweise soll Graupner aber dazugelernt haben.
- Wenn möglich, S.BUS-Unterstützung, damit ich nicht erst einen Haufen Kabel vom Empfänger zur Naza-M-Steuerung des Phantom ziehen muss.
 |
| Futaba Sender T14SG sowie R7008SB Empfänger, beides mit Telemetrie-Funktion. |
Ein wesentlicher Grund für mich ist, dass Futaba ein echtes Kanalsprungverfahren benutzt, bei dem nach wenigen Millisekunden gesprungen wird. JR/Graupner arbeitet nach meiner Information hingegen statisch mit zwei Kanälen, die beim Einschalten per Messung als frei deklariert wurden. Das ist, mit Verlaub, ein dämliches Konzept und nicht umsonst arbeiten diverse IEEE 802.11 Funkttechnologien auch mit richtigen Kanalsprungverfahren.
Die 14 Kanäle des T14SG nutze ich zwar nicht aus, dafür ist aber die integrierte Telemetriefunktion ein echter und praktischer Bonus, die mit meine Kaufentscheidung prägte: immer über die wahre Akkuspannung im Phantom informiert! Als Empfänger kommt im Set dazu passend der Empfänger R7008SB mit S.BUS- und S.BUS2-Unterstützung mit, was für mich auch wichtig war, denn ich wollte eigentlich ganz gerne per S.BUS den Empfänger mit dem Naza-M Chip verbinden.
Verkehrte Welt der Telemetrie: Empfänger senden!
 |
| Das Phantom phunkt. Und zwar zurück! |
Mit Hilfe eines Futaba-Adapterkabels führe zudem ich die tatsächliche Akkuspannung der 11,1V 3S LiPo-Flugakkus zum Messen an den Empfänger R7008SB und bekomme damit ein korrektes Bild der Akkusituation. Im Gegensatz dazu hilft die stabilisierte Empfängerspannung nicht weiter, da sie beim Phantom konstant bei etwa 5.5V bis 5.6V liegt und damit wenig aussagekräftig ist. Die Empfängerversorgung geschieht übrigens bereits über die Servokabel oder das S.BUS(2)-Kabel.
Eigene Erfahrung: Im praktischen Flugbetrieb konnte ich keine Verringerung der Flugdauer infolge der Telemetriefunktion feststellen. Bei der jeweils nur sehr kurzen Telemetriedaten-Übertragung nur alle Sekunde dürfte der Bedarf an Sendeenergie gegenüber dem Energieverbrauch für das Fliegen zu vernachlässigen sein.
Der Umbau sieht leicht aus...
 |
| Diese vier Schrauben müssen an jedem Arm gelöst werden. |
Wenn ihr, so wie ich, die roten Markierungsstreifen auf die vorderen beiden Arme geklebt habt, dann solltet ihr zunächst mit einem scharfen Messer (am besten ein Teppichmesser oder ein Skalpell) die Aufkleber an der Trennfuge zwischen dem Gehäuseoberteil und -unterteil des Phantoms zertrennen. Wenn das Messer scharf genug ist, dann geht das ganz einfach; drückt aber nur vorsichtig auf, damit ihr nicht in die Gehäuseschale schneidet.
An Werkzeug benötigt ihr zum Öffnen des Phantom-Gehäuses:
- einen Kreuzschlitz-Schraubendreher der Größe 0. Inzwischen sind die aus dem englischen Sprachraum stammenden Größenangaben gängig, hier also PH0.
Achtung! Auf gar keinen Fall dürft ihr einen sogenannten Pozidriv-Schraubendreher der Größe PZ0 verwenden (erkennbar an einer zusätzlichen kreuzförmigen Markierung)! Ihr macht euch sonst die Schraubenköpfe kaputt und könnt sie dann nicht wieder herausschrauben. Im Fall der Fälle kann ein Schlitz-Schraubendreher mit einer 1,5mm breiten Klinge noch als Nothelfer dienen.
- einen Innensechskant-Schraubendreher der Schlüsselweite 2(mm).
Der Ausbau des originalen DJI-Empfängers geht recht einfach, wenn man erst einmal die beiden kleinen Kreuzschlitzschrauben gelöst hat, die das Platinchen fixieren. Das mit Silikonkleber fixierte Anschlusskabel löst ihr am besten, indem ihr vorsichtig mit einem scharfen Messer den Silikontropfen anschneidet und dann den Stecker abzieht. Entfernt danach bitte möglichst alle Rückstände vom Stecker, damit ihr später keine Probleme mit dem Stecker bekommt. Der Stecker kommt später in den Futaba-Empfänger R7008SB.
Firmware-Update Naza-M
Allerdings gilt es, bei meinem Futaba-Sender T14SG und Empfänger S7008SB ein wichtiges Detail zu beachten:
Wie der Firmware-Update funktioniert, wird von DJI recht gut erklärt. Außerdem gibt es dazu auch ein Video von Arthur Kunze, also einfach einmal in dessen Kanal bei YouTube schauen.Achtung! Um den Futaba-Empfänger R7008SB per S.BUS2 erfolgreich mit der Naza-M Steuerung des Phantoms verbinden zu können, ist zwingend mindestens die Firmwareversion 3.16 oder neuer für das Phantom erforderlich. Ältere Firmwaren kommen weder mit dem leicht modifizierten S.BUS-Protokoll des R7008SB zurecht, noch mit dem neueren S.BUS2-Protokoll.
Der Umbau
 |
| Befestigung des neuen Empfängers. |
Ebenso war der Einbau des neuen Empfängers R7008SB von Futaba problemlos.
Bei der Gelegenheit sollte man auch gleich noch das Kabel 1-F1001100 für die Messung der Spannung der Flugakkus verlegen. Das habe ich praktischerweise an das schon verhandene dünne (rot-graue) Reserve-Versorgungskabel des Phantom angeschlossen. Dieses Kabel braucht man für den Gimbal sowieso nicht und auf diese Weise muss man nicht an den Lötpunkten der dicken Versorgungsleitungen auf der Hauptplatine herumwerkeln. So meine ursprüngliche Idee ... die auch wieder Markulatur ist, da ich für den Zenmuse H3-2D Gimbal sowieso die Hauptplatine tauschen werde. Sei's drum.
 |
| 3M Dual Lock |
Es geht aber natürlich auch mit klassischen selbstklebendem Klettverschluss-Streifen, die diverse Hersteller anbieten. Der Vorteil von 3M Dual Lock ist aber deren höhere Haltekraft durch eine anders konstruierte Häkchenform (und ich meine hier nicht die dämliche Werbeaussage auf der Vorderseite der Verpackung).
 |
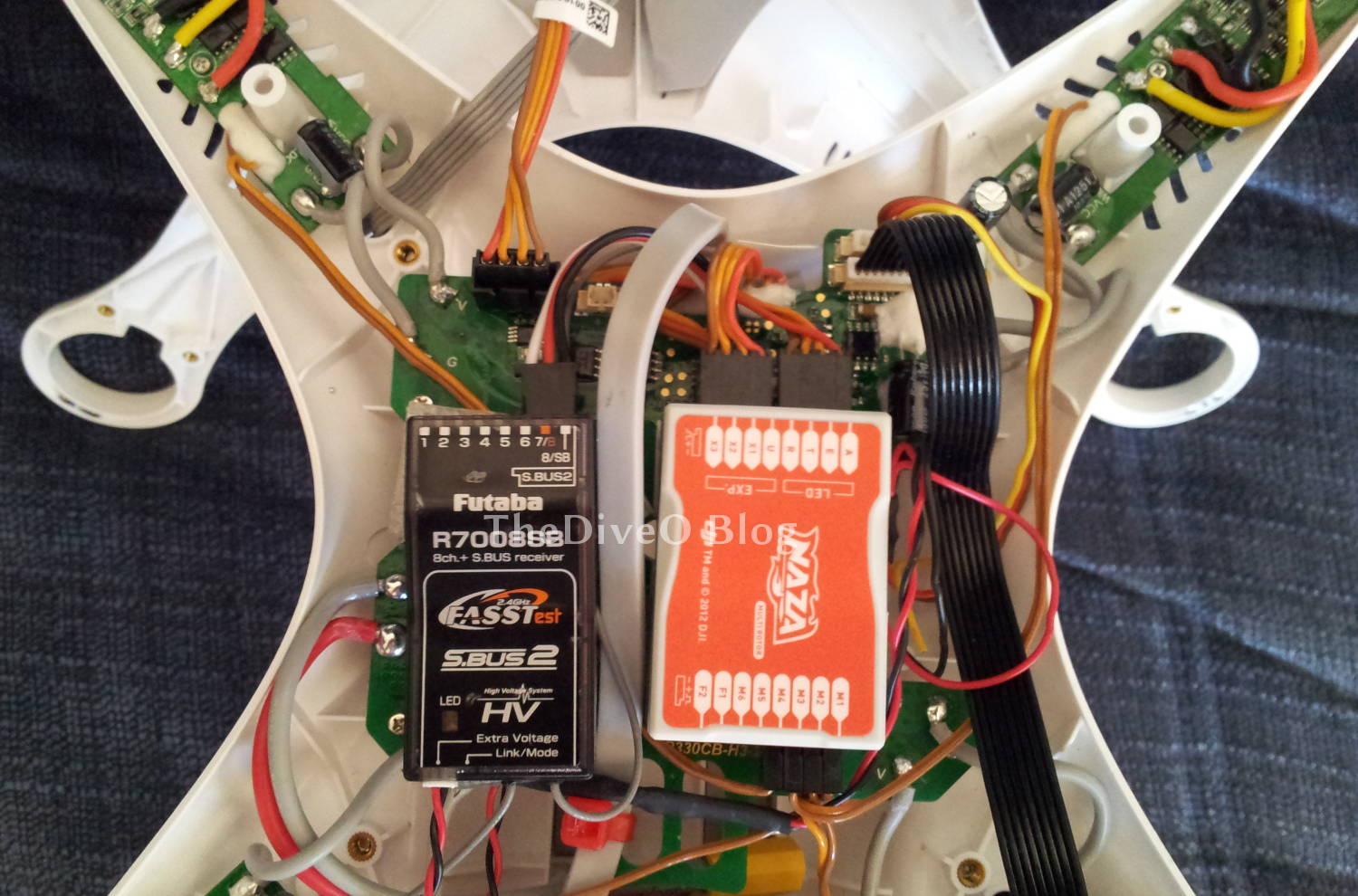
| Kein Kabelsalat dank S.BUS2-Anschluss. Rechte Einbaulage des R7008SB mit der originalen Phantom-Hauptplatine. |
Im Prinzip sollte ab dann auch der Anschluss am S.BUS-Ausgang funktionieren, dazu muss aber der Empfänger umprogrammiert werden, was eine hakelige Fummelei ist. Nachdem nun aber der S.BUS2 durch den Naza-M unterstützt wird, habe ich mir diesen Versuch erspart. Es macht auch keinen Sinn mehr, den S.BUS-Anschluss erst extra zu aktivieren, wenn es sowieso nun direkt mit dem S.BUS2-Anschluss funktioniert.
 |
| Linke Einbaulage des R7008SB mit der erweiterten Hauptplatine des Phantom Connection Kits. |
Der Naza-M ist bei der erweiterten Hauptplatine nämlich leicht nach rechts gewandert, so dass rechts neben ihm zwar gerade noch Platz für den originalen DJI-Empfänger ist, nicht jedoch für den R7008SB. Also muss der R7008SB auf die andere Seite, wo er leicht aufgebockt werden sollte, damit noch ein kleiner Luftspalt zwischen ihm und einigen Halbleiterelementen auf der Hauptplatine bleibt.
Antennenlage
Zunächst einmal sollte man die beiden Antennenkabel des R7008SB geeignet im Phantom verlegen. Futaba rät dazu, die beiden Antennen zueinander im 90°-Winkel zu positionieren. Diese Empfehlung muss aber nicht über die gesamte Länge eingehalten werden, sondern nur für die Enden der Antennenkabel. Der Grund dafür ist, dass als eigentliche Antenne nur der nicht abgeschirmte Bereich am Ende des Antennenkabels zählt. Er ist gut an der transparenten Isolierung zu erkennen, wohingegen die abgeschirmten Bereiche grau ummantelt sind.
Außerdem rät Futaba, die Antennen möglichst von Fahrreglern (ESCs) fernzuhalten. Das ist allerdings in der Praxis nicht ganz so einfach, zumindest in Bezug auf die Zuleitungen zu den ESCs, also den elektronischen Geschwindigkeitsreglern.
In der Abbildung oben habe ich die von mir gewählte Führung der beiden grauen Antennenkabel erkennen.
- Die Antenne 1 führt dabei zur nächstgelegenen Durchführung und dort in das Landegestell hinab. Diese Antenne ist ähnlich wie die originale Antenne mit einem selbstklebenden Gewebestreifen befestigt.
- Die Antenne 2 verbleibt dagegen im Inneren des Phantom, wobei ich sie zunächst am Empfänger vorbei und dann im 90°-Winkel hinter dem Empfänger- und Naza-M-Chips verlegt habe. Der Trick hierbei ist, dass das Antennenende damit nicht mehr den Motorensteuerungen (ESCs) zu Nahe kommt.
Das Paarungsritual
Das Anmelden des Empfängers am Sender T14SG funktionierte problemlos ... nachdem ich endlich begriffen hatte, dass zunächst der Sender in Paarungsstimmung gebracht werden muss, ehe man den Empfänger einschaltet. Das steht ja auch so in der Anleitung, muss ich halt nicht nur drüber lesen...
Eigentlich ist das aus Gründen der Sicherheit auch so herum sinnvoll, weil ein Empfänger nur direkt beim Einschalten neu gepaart werden kann, niemals im Flug. Nur hatte ich natürlich noch die schmutzigen Gedanken an das Paarungsritual des DJI-Empfängers im Hinterkopf, die mussten erst einmal weg, danach klappte alles.
Verdrahtung R7008SB mit Naza-M V1
Abschließend muss mit der «Naza-M Assistent» Software der Naza-M-Steuerung mitgeteilt werden, dass sie mit dem Empfänger per S.BUS2 verbunden ist. Wohl aus markenrechtlichen Gründen nennt DJI diese Betriebsart D-BUS.
 |
| Naza-M V1 Firmware 3.16: endlich auch mit S.BUS2-Unterstützung. |
Dazu wechselt man im Assistenten auf die Seite Basic und wählt dort den Reiter RC aus. Als Receiver Type stellt man hier nun D-BUS ein. Fertig. Bevor man dann noch hier die Steuerknüppel kalibriert, sollte man zunächst erst einmal den Sender komplett konfigurieren.
Die genaue Konfiguration (Programmierung) des Futaba-Senders T14SG erläutere ich in einem separaten Folgebeitrag: Einrichten des Phantom-Senders T14SG. Dieser Artikel ist auch so bereits lang genug.
Es fliegt!
Nach dem Zusammenbau und nochmaliger Kontrolle aller Schrauben ging es dann zum Probeflug aufs Feld. Die ersten Flüge mit neuem Sender und Empfänger verliefen völlig problemlos. Damit ist der Umbau zunächst einmal abgeschlossen.
11 Kommentare:
Mir gelingt es offenbar nicht das Rot/Graue Kabel im Kopter mit dem Empfänger zu verbinden. (rot an rot, schwarz auf grau) Das Robbekabel nutze ich selbstverständlich. Hast Du ggf. noch einen Tipp für mich....
Wie hast Du das Rot Graue-Kabel mit dem Empfängerkabel verbunden? (Klemme? ...verdrillt...verlötet?)
Mir ist leider nicht vollständig klar, was Du mit dem Verbinden genau meinst: gehts um den Anschluss oder bekommst Du keine Werte zurück gefunkt?
Von einer Klemme oder Steckverbindung würde ich abraten. Groß und vergleichsweise schwer, außerdem musst Du sie irgendwie im Phantom befestigen (Silikonkleber oder ähnliches) damit sie nicht umher schlägt. Außerdem kann sich auch ein Kabel aus dem Stecker lösen und das wäre wirklich moglicherweise fatal. An diesem Kabel liegt auf einer Seite die ungesicherte Akkuspannung.
Ich habe es deshalb klassisch gemacht: die Enden beider Kabel abisoliert und dann verzinnt. Geeignete Schrumpfschläuche auffädeln, dann die verzinnten Enden gegensinnig verlöten (ist halt eine Pfriemelei, manchmal hilft Verdrillen). Schrumpfschläuche sorgfältig über die Lötstellen schieben, so dass wirklich alle blanken Bereiche vollständig abgedeckt sind und dann mit einer Heißluftpistole die Schläuche aufschrumpfen.
Ansonsten kontrollieren, ob dieser elendig popelig kleine Stecker richtig herum im R7008SB sitzt ... und vor allem richtig eingerastet ist. Er versinkt dann beinahe schon.
Hilft das nicht, den Stecker wieder abziehen und die VCC und GND Schienen durchmessen. Bitte wirklich durchmessen und nicht den Akku anklemmen und dann am Stecker messen: ein kleiner Fehler und der Kurzschluss artet in ein gefährliches Feuerwerk aus. Deshalb mit dem Multimeter einmal Durchgang vom Akkuanschluss VCC bis Steckerende Futabakabel messen, danach das gleiche für GND.
Wenn der Stecker richtig herum drin steckt und auch fühl- und evtl. hörbar eingerastet ist, dann sollte es funktionieren. Es sei denn, Du hast wirklich zufällig einen defekten R7008SB erwischt, aber das dürfte sehr selten sein. Wenn ich so an mein defektes USB-Kabel von DJI denke...
Danke für Deine umfangreiche Antwort.
Weißt du zufällig wie man eine akustische Warnung bei erreichen eines geeigneten Schwellwertes an der t14sg programmiert....
Ich wäre dann wunschlos glücklich.....hätte dieses aber ohne Deine Postings nie geschafft.
Nochmals DANKE dafür!
Es freut mich, dass ich hier helfen konnte. Dein jüngster Wunsch lässt sich gut erfüllen: mit [LNK] ins Linkage Menü. Auf der zweiten Seite befindet sich der Menüpunkt [TELEMETRY], den auswählen.
Es erscheint die Konfigurationsseite mit den beiden verfügbaren Telemetriedatensätzen. Hier auf [EXT-VOLT] gehen und wieder [RTN] antippen.
Es erscheint die Konfigurationsseite für die externe Spannungsmessung. In der Zeile ACT stellst Du nun [ACT] ein. Für Threshold darunter danach 10.7V. Und unter Vibes stellst Du, wenn gewünscht, das Vibrationsmuster ein, wenn die Spannung unterschritten wird. Die akustische Warnung mit einem regelmäßigen Piepton kommt sowieso immer, es sei denn, Du hast im Systemmenü unter [SOUND] die Warnungen abgestellt. Im Normalfall sind die aber immer aktiviert.
Jetzt hab ich mal eine kleine Frage: wie bist Du denn zur T14SG gekommen?
Es muss natürlich heißen: in der Zeile ALERT stellst Du [ACT] ein.
Die Antwort zu Deiner Frage :-)
Größenwahn, ein verdammt guter Preis und die mangelnde Verfügbarkeit der T8.
Ich hatte einfach geglaubt, dass sie t8 und die 14er sich konfigurationsmaessig ähneln.....
Was kann man den aus Deiner Sicht noch brauchbares mit der Futaba anstellen?
Hast Du ggf. Schon Erfahrungen mit den Vario/GPS Sensoren (Telemetrie) von Robbe/Futaba?
Ich habe noch keine weitere Erfahrung mit zusätzlicher Telemetrie. Die GPS-Funktion wäre nicht schlecht; ich vermute aber, dass hier DJI selbst noch nachlegt. Nachdem ja bereits ein Modul zum Einblenden von Daten in das Videobild da ist, warte ich einmal ab, in welche Richtung sich das alles entwickelt.
Ich hatte auch zunächst gedacht, dass sich T8 und T14SG ähneln ... bin aber froh darüber, die T14SG genommen zu haben. Das Handbuch der T8 macht auf mich einen sehr nachlässigen Eindruck. Anscheinend gibt man sich aus Gründen des Kostendrucks nur noch bei den höherwertigen Senders Mühe. Mir ist das besonders am originalen englischen Handbuch zum T8 aufgefallen: da auf viel Seiten unvollstän Satz. Das typische asiatische Englisch eben, weil sich viele Asiaten mit Pronomen und anderen "Füllwörtern" sehr schwer tun.
Von Robbe habe ich erfahren, dass das nächste Firmwareupdate GPS Tracking beinhalten soll, deshalb juckst mich in den Fingern.....
Hallo,
Ich habe mit deiner Hilfe einen T14SG auf einen X8 Octocopter Programmiert, läuft alles so wie bei Phantom. Dafür Vielen Dank!
Ich hätte noch eine frage zu dem Telemetrie Kabel "Kabel 1-F1001100 " sehe ich das richtig das ich das Kabel direkt an das Powerboard in meinem fall ein 4S Akku anlöte?! Nicht das ich den Empfänger Schrotte?!
Der R7008SB verträgt meiner Erinnerung nach bis 60V an seiner "ext. Volt" Buchse, in die das genannte Kabel passt. Daher kann hier gefahrlos für den Empfänger die Batteriespannung eines 4s-LiPos angelegt werden. Allerdings unbedingt auf die korrekte Polarität achten. Ich weiß nicht, ob die in das oben angesprochene Kabel integrierte Schutzsicherung eine Verpolung abfängt.
Ich habe beim Phantom mir die direkte und unstabilisierte Akkuspannung ursprünglich über das Reservekabel und dann später nach dem Umbau der Hauptplatine aus dem Versorgungsanschluss für einen Videosender geholt, den DJI freundlicherweise vorgesehen hatte. Vielleicht gibt es ja so einen ähnlichen Anschlusspunkt auch beim X8? Ich wollte nicht an dicken Leitungen noch die dünne Messleitung mit anlöten müssen.
Nachbemerkung: nur an den Servoanschlussbuchsen muss die Spannung zwischen (circa) 5 bis 7 Volt begrenzt sein. Der Messanschluss für die externe Spannung darf hingegen bis 60 Volt versorgt werden.
Kommentar veröffentlichen